![]()

チュートリアル 2: 深いMLP
第1週、第3日目: 多層パーセプトロン
Neuromatch Academyによる
コンテンツ作成者: Arash Ash, Surya Ganguli
コンテンツレビュアー: Saeed Salehi, Felix Bartsch, Yu-Fang Yang, Melvin Selim Atay, Kelson Shilling-Scrivo
コンテンツ編集者: Gagana B, Kelson Shilling-Scrivo, Spiros Chavlis
制作編集者: Anoop Kulkarni, Kelson Shilling-Scrivo, Gagana B, Spiros Chavlis
チュートリアルの目的
このチュートリアルでは、MLPについてさらに深く掘り下げ、その数学的および実践的な側面を詳しく見ていきます。今日はMLPがなぜ以下のようになるのかを見ていきます:
- 深くも広くもできる
- 転送関数に依存する
- 初期化に敏感である
# @title Tutorial slides
from IPython.display import IFrame
link_id = "ed65b"
print(f"If you want to download the slides: https://osf.io/download/{link_id}/")
IFrame(src=f"https://mfr.ca-1.osf.io/render?url=https://osf.io/{link_id}/?direct%26mode=render%26action=download%26mode=render", width=854, height=480)セットアップ
このノートブックはGPUを使用しません!
# @title Install and import feedback gadget
from vibecheck import DatatopsContentReviewContainer
def content_review(notebook_section: str):
return DatatopsContentReviewContainer(
"", # No text prompt
notebook_section,
{
"url": "https://pmyvdlilci.execute-api.us-east-1.amazonaws.com/klab",
"name": "neuromatch_dl",
"user_key": "f379rz8y",
},
).render()
feedback_prefix = "W1D3_T2"# Imports
import pathlib
import torch
import numpy as np
import matplotlib.pyplot as plt
import torch.nn as nn
import torch.optim as optim
from torchvision.utils import make_grid
import torchvision.transforms as transforms
from torchvision.datasets import ImageFolder
from torch.utils.data import DataLoader, TensorDataset
from tqdm.auto import tqdm
from IPython.display import display# @title Figure Settings
import logging
logging.getLogger('matplotlib.font_manager').disabled = True
import ipywidgets as widgets # Interactive display
%config InlineBackend.figure_format = 'retina'
plt.style.use("https://raw.githubusercontent.com/NeuromatchAcademy/content-creation/main/nma.mplstyle")
my_layout = widgets.Layout()# @title Helper functions (MLP Tutorial 1 Codes)
# @markdown `Net(nn.Module)`
class Net(nn.Module):
"""
Simulate MLP Network
"""
def __init__(self, actv, input_feature_num, hidden_unit_nums, output_feature_num):
"""
Initialize MLP Network parameters
Args:
actv: string
Activation function
input_feature_num: int
Number of input features
hidden_unit_nums: list
Number of units per hidden layer. List of integers
output_feature_num: int
Number of output features
Returns:
Nothing
"""
super(Net, self).__init__()
self.input_feature_num = input_feature_num # Save the input size for reshapinng later
self.mlp = nn.Sequential() # Initialize layers of MLP
in_num = input_feature_num # Initialize the temporary input feature to each layer
for i in range(len(hidden_unit_nums)): # Loop over layers and create each one
out_num = hidden_unit_nums[i] # Assign the current layer hidden unit from list
layer = nn.Linear(in_num, out_num) # Use nn.Linear to define the layer
in_num = out_num # Assign next layer input using current layer output
self.mlp.add_module(f"Linear_{i}", layer) # Append layer to the model with a name
actv_layer = eval(f"nn.{actv}") # Assign activation function (eval allows us to instantiate object from string)
self.mlp.add_module(f"Activation_{i}", actv_layer) # Append activation to the model with a name
out_layer = nn.Linear(in_num, output_feature_num) # Create final layer
self.mlp.add_module('Output_Linear', out_layer) # Append the final layer
def forward(self, x):
"""
Simulate forward pass of MLP Network
Args:
x: torch.tensor
Input data
Returns:
logits: Instance of MLP
Forward pass of MLP
"""
# Reshape inputs to (batch_size, input_feature_num)
# Just in case the input vector is not 2D, like an image!
x = x.view(-1, self.input_feature_num)
logits = self.mlp(x) # forward pass of MLP
return logits
# @markdown `train_test_classification(net, criterion, optimizer, train_loader, test_loader, num_epochs=1, verbose=True, training_plot=False)`
def train_test_classification(net, criterion, optimizer, train_loader,
test_loader, num_epochs=1, verbose=True,
training_plot=False, device='cpu'):
"""
Accumulate training loss/Evaluate performance
Args:
net: Instance of Net class
Describes the model with ReLU activation, batch size 128
criterion: torch.nn type
Criterion combines LogSoftmax and NLLLoss in one single class.
optimizer: torch.optim type
Implements Adam algorithm.
train_loader: torch.utils.data type
Combines the train dataset and sampler, and provides an iterable over the given dataset.
test_loader: torch.utils.data type
Combines the test dataset and sampler, and provides an iterable over the given dataset.
num_epochs: int
Number of epochs [default: 1]
verbose: boolean
If True, print statistics
training_plot=False
If True, display training plot
device: string
CUDA/GPU if available, CPU otherwise
Returns:
Nothing
"""
net.to(device)
net.train()
training_losses = []
for epoch in tqdm(range(num_epochs)): # Loop over the dataset multiple times
running_loss = 0.0
for i, data in enumerate(train_loader, 0):
# Get the inputs; data is a list of [inputs, labels]
inputs, labels = data
inputs = inputs.to(device).float()
labels = labels.to(device).long()
# Zero the parameter gradients
optimizer.zero_grad()
# forward + backward + optimize
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# Print statistics
if verbose:
training_losses += [loss.item()]
net.eval()
def test(data_loader):
"""
Function to gauge network performance
Args:
data_loader: torch.utils.data type
Combines the test dataset and sampler, and provides an iterable over the given dataset.
Returns:
acc: float
Performance of the network
total: int
Number of datapoints in the dataloader
"""
correct = 0
total = 0
for data in data_loader:
inputs, labels = data
inputs = inputs.to(device).float()
labels = labels.to(device).long()
outputs = net(inputs)
_, predicted = torch.max(outputs, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
acc = 100 * correct / total
return total, acc
train_total, train_acc = test(train_loader)
test_total, test_acc = test(test_loader)
if verbose:
print(f'\nAccuracy on the {train_total} training samples: {train_acc:0.2f}')
print(f'Accuracy on the {test_total} testing samples: {test_acc:0.2f}\n')
if training_plot:
plt.plot(training_losses)
plt.xlabel('Batch')
plt.ylabel('Training loss')
plt.show()
return train_acc, test_acc
# @markdown `shuffle_and_split_data(X, y, seed)`
def shuffle_and_split_data(X, y, seed):
"""
Helper function to shuffle and split data
Args:
X: torch.tensor
Input data
y: torch.tensor
Corresponding target variables
seed: int
Set seed for reproducibility
Returns:
X_test: torch.tensor
Test data [20% of X]
y_test: torch.tensor
Labels corresponding to above mentioned test data
X_train: torch.tensor
Train data [80% of X]
y_train: torch.tensor
Labels corresponding to above mentioned train data
"""
# Set seed for reproducibility
torch.manual_seed(seed)
# Number of samples
N = X.shape[0]
# Shuffle data
shuffled_indices = torch.randperm(N) # Get indices to shuffle data, could use torch.randperm
X = X[shuffled_indices]
y = y[shuffled_indices]
# Split data into train/test
test_size = int(0.2 * N) # Assign test datset size using 20% of samples
X_test = X[:test_size]
y_test = y[:test_size]
X_train = X[test_size:]
y_train = y[test_size:]
return X_test, y_test, X_train, y_train# @title Plotting functions
def imshow(img):
"""
Helper function to plot unnormalised image
Args:
img: torch.tensor
Image to be displayed
Returns:
Nothing
"""
img = img / 2 + 0.5 # Unnormalize
npimg = img.numpy()
plt.imshow(np.transpose(npimg, (1, 2, 0)))
plt.axis(False)
plt.show()
def sample_grid(M=500, x_max=2.0):
"""
Helper function to simulate sample meshgrid
Args:
M: int
Size of the constructed tensor with meshgrid
x_max: float
Defines range for the set of points
Returns:
X_all: torch.tensor
Concatenated meshgrid tensor
"""
ii, jj = torch.meshgrid(torch.linspace(-x_max, x_max,M),
torch.linspace(-x_max, x_max, M),
indexing='ij')
X_all = torch.cat([ii.unsqueeze(-1),
jj.unsqueeze(-1)],
dim=-1).view(-1, 2)
return X_all
def plot_decision_map(X_all, y_pred, X_test, y_test,
M=500, x_max=2.0, eps=1e-3):
"""
Helper function to plot decision map
Args:
X_all: torch.tensor
Concatenated meshgrid tensor
y_pred: torch.tensor
Labels predicted by the network
X_test: torch.tensor
Test data
y_test: torch.tensor
Labels of the test data
M: int
Size of the constructed tensor with meshgrid
x_max: float
Defines range for the set of points
eps: float
Decision threshold
Returns:
Nothing
"""
decision_map = torch.argmax(y_pred, dim=1)
for i in range(len(X_test)):
indeces = (X_all[:, 0] - X_test[i, 0])**2 + (X_all[:, 1] - X_test[i, 1])**2 < eps
decision_map[indeces] = (K + y_test[i]).long()
decision_map = decision_map.view(M, M).cpu()
plt.imshow(decision_map, extent=[-x_max, x_max, -x_max, x_max], cmap='jet')
plt.axis('off')
plt.plot()# @title Set random seed
# @markdown Executing `set_seed(seed=seed)` you are setting the seed
# For DL its critical to set the random seed so that students can have a
# baseline to compare their results to expected results.
# Read more here: https://pytorch.org/docs/stable/notes/randomness.html
# Call `set_seed` function in the exercises to ensure reproducibility.
import random
import torch
def set_seed(seed=None, seed_torch=True):
"""
Function that controls randomness. NumPy and random modules must be imported.
Args:
seed : Integer
A non-negative integer that defines the random state. Default is `None`.
seed_torch : Boolean
If `True` sets the random seed for pytorch tensors, so pytorch module
must be imported. Default is `True`.
Returns:
Nothing.
"""
if seed is None:
seed = np.random.choice(2 ** 32)
random.seed(seed)
np.random.seed(seed)
if seed_torch:
torch.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
torch.cuda.manual_seed(seed)
torch.backends.cudnn.benchmark = False
torch.backends.cudnn.deterministic = True
print(f'Random seed {seed} has been set.')
# In case that `DataLoader` is used
def seed_worker(worker_id):
"""
DataLoader will reseed workers following randomness in
multi-process data loading algorithm.
Args:
worker_id: integer
ID of subprocess to seed. 0 means that
the data will be loaded in the main process
Refer: https://pytorch.org/docs/stable/data.html#data-loading-randomness for more details
Returns:
Nothing
"""
worker_seed = torch.initial_seed() % 2**32
np.random.seed(worker_seed)
random.seed(worker_seed)# @title Set device (GPU or CPU). Execute `set_device()`
# especially if torch modules used.
# Inform the user if the notebook uses GPU or CPU.
def set_device():
"""
Set the device. CUDA if available, CPU otherwise
Args:
None
Returns:
Nothing
"""
device = "cuda" if torch.cuda.is_available() else "cpu"
if device != "cuda":
print("GPU is not enabled in this notebook. \n"
"If you want to enable it, in the menu under `Runtime` -> \n"
"`Hardware accelerator.` and select `GPU` from the dropdown menu")
else:
print("GPU is enabled in this notebook. \n"
"If you want to disable it, in the menu under `Runtime` -> \n"
"`Hardware accelerator.` and select `None` from the dropdown menu")
return deviceSEED = 2021
set_seed(seed=SEED)
DEVICE = set_device()# @title Download of the Animal Faces dataset
# @markdown Animal faces consists of 16,130 32x32 images belonging to 3 classes
import requests, os
from zipfile import ZipFile
print("Start downloading and unzipping `AnimalFaces` dataset...")
name = 'AnimalFaces32x32'
fname = f"{name}.zip"
url = f"https://osf.io/kgfvj/download"
r = requests.get(url, allow_redirects=True)
with open(fname, 'wb') as fh:
fh.write(r.content)
with ZipFile(fname, 'r') as zfile:
zfile.extractall(f"./{name}")
if os.path.exists(fname):
os.remove(fname)
else:
print(f"The file {fname} does not exist")
os.chdir(name)
print("Download completed.")# @title Data Loader
# @markdown Execute this cell!
K = 4
sigma = 0.4
N = 1000
t = torch.linspace(0, 1, N)
X = torch.zeros(K*N, 2)
y = torch.zeros(K*N)
for k in range(K):
X[k*N:(k+1)*N, 0] = t*(torch.sin(2*np.pi/K*(2*t+k)) + sigma**2*torch.randn(N)) # [TO-DO]
X[k*N:(k+1)*N, 1] = t*(torch.cos(2*np.pi/K*(2*t+k)) + sigma**2*torch.randn(N)) # [TO-DO]
y[k*N:(k+1)*N] = k
X_test, y_test, X_train, y_train = shuffle_and_split_data(X, y, seed=SEED)
# DataLoader with random seed
batch_size = 128
g_seed = torch.Generator()
g_seed.manual_seed(SEED)
test_data = TensorDataset(X_test, y_test)
test_loader = DataLoader(test_data, batch_size=batch_size,
shuffle=False, num_workers=0,
worker_init_fn=seed_worker,
generator=g_seed,
)
train_data = TensorDataset(X_train, y_train)
train_loader = DataLoader(train_data,
batch_size=batch_size,
drop_last=True,
shuffle=True,
worker_init_fn=seed_worker,
generator=g_seed,
)セクション1: 幅広いネットワーク vs 深いネットワーク
所要時間の目安: 約45分
# @title Video 1: Deep Expressivity
from ipywidgets import widgets
from IPython.display import YouTubeVideo
from IPython.display import IFrame
from IPython.display import display
class PlayVideo(IFrame):
def __init__(self, id, source, page=1, width=400, height=300, **kwargs):
self.id = id
if source == 'Bilibili':
src = f'https://player.bilibili.com/player.html?bvid={id}&page={page}'
elif source == 'Osf':
src = f'https://mfr.ca-1.osf.io/render?url=https://osf.io/download/{id}/?direct%26mode=render'
super(PlayVideo, self).__init__(src, width, height, **kwargs)
def display_videos(video_ids, W=400, H=300, fs=1):
tab_contents = []
for i, video_id in enumerate(video_ids):
out = widgets.Output()
with out:
if video_ids[i][0] == 'Youtube':
video = YouTubeVideo(id=video_ids[i][1], width=W,
height=H, fs=fs, rel=0)
print(f'Video available at https://youtube.com/watch?v={video.id}')
else:
video = PlayVideo(id=video_ids[i][1], source=video_ids[i][0], width=W,
height=H, fs=fs, autoplay=False)
if video_ids[i][0] == 'Bilibili':
print(f'Video available at https://www.bilibili.com/video/{video.id}')
elif video_ids[i][0] == 'Osf':
print(f'Video available at https://osf.io/{video.id}')
display(video)
tab_contents.append(out)
return tab_contents
video_ids = [('Youtube', 'g8JuGrNk9ag'), ('Bilibili', 'BV19f4y157vG')]
tab_contents = display_videos(video_ids, W=854, H=480)
tabs = widgets.Tab()
tabs.children = tab_contents
for i in range(len(tab_contents)):
tabs.set_title(i, video_ids[i][0])
display(tabs)# @title Submit your feedback
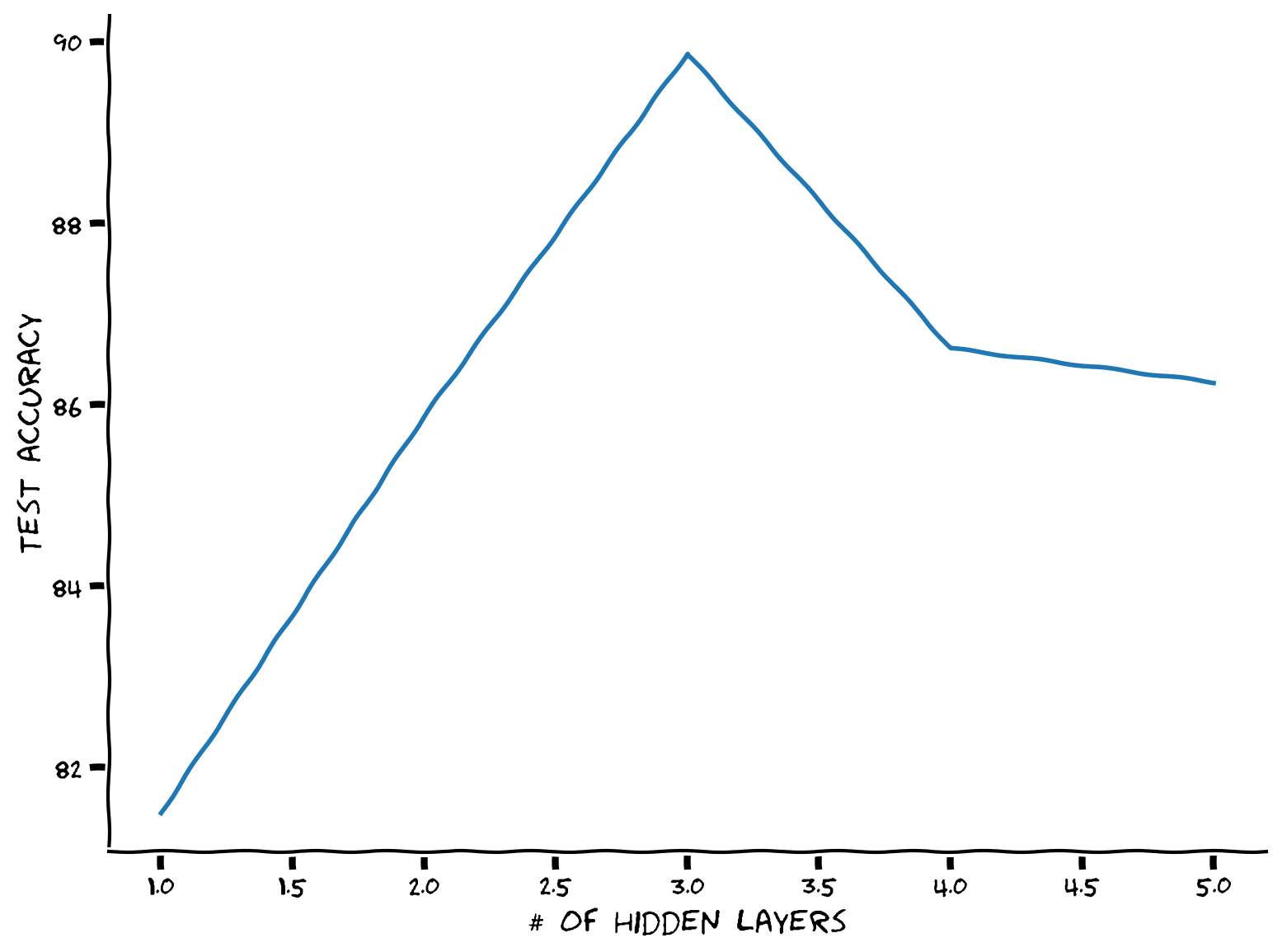
content_review(f"{feedback_prefix}_Deep_Expressivity_Video")コーディング演習1: パラメータ数を同じに保ちながら幅広さと深さを比較
固定されたパラメータ数の制約のもとで最適な隠れ層の数を見つけましょう!
まずはモデルのパラメータ数をカウントする関数が必要です。.parameters()を呼び出してモデルの層を反復処理し、.numel()で層のパラメータ数を数えることができます。また、requires_grad属性を使って訓練可能なパラメータかどうかを確認できます。例えば、
x = torch.ones(10, 5, requires_grad=True)
カウンター関数を定義した後、深さを段階的に増やし、隠れユニット数(すべての隠れ層で同じと仮定)を可能な範囲で反復し、パラメータカウンターを使って全体のパラメータ数がmax_par_countに近くなる隠れユニット数を選びます。
def run_depth_optimizer(max_par_count, max_hidden_layer, device):
"""
Simulate Depth Optimizer
Args:
max_par_count: int
Maximum number of hidden units in layer of depth optimizer
max_hidden_layer: int
Maximum number of hidden layers within depth optimizer
device: string
CUDA/GPU if available, CPU otherwise
Returns:
hidden_layers: int
Number of hidden layers in depth optimizer
test_scores: list
Log of test scores
"""
####################################################################
# Fill in all missing code below (...),
# then remove or comment the line below to test your function
raise NotImplementedError("Define the depth optimizer function")
###################################################################
def count_parameters(model):
"""
Function to count model parameters
Args:
model: instance of Net class
MLP instance
Returns:
par_count: int
Number of parameters in network
"""
par_count = 0
for p in model.parameters():
if p.requires_grad:
par_count += ...
return par_count
# Number of hidden layers to try
hidden_layers = ...
# Test test score list
test_scores = []
for hidden_layer in hidden_layers:
# Initialize the hidden units in each hidden layer to be 1
hidden_units = np.ones(hidden_layer, dtype=int)
# Define the the with hidden units equal to 1
wide_net = Net('ReLU()', X_train.shape[1], hidden_units, K).to(device)
par_count = count_parameters(wide_net)
# Increment hidden_units and repeat until the par_count reaches the desired count
while par_count < max_par_count:
hidden_units += 1
wide_net = Net('ReLU()', X_train.shape[1], hidden_units, K).to(device)
par_count = ...
# Train it
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(wide_net.parameters(), lr=1e-3)
_, test_acc = train_test_classification(wide_net, criterion, optimizer,
train_loader, test_loader,
num_epochs=100, device=device)
test_scores += [test_acc]
return hidden_layers, test_scores
set_seed(seed=SEED)
max_par_count = 100
max_hidden_layer = 5
## Uncomment below to test your function
# hidden_layers, test_scores = run_depth_optimizer(max_par_count, max_hidden_layer, DEVICE)
# plt.xlabel('# of hidden layers')
# plt.ylabel('Test accuracy')
# plt.plot(hidden_layers, test_scores)
# plt.show()出力例:
# @title Submit your feedback
content_review(f"{feedback_prefix}_Wide_vs_Deep_Exercise")考えてみよう!1: なぜトレードオフがあるのか?
ここで、最適な隠れ層の数が存在することがわかりました。このシナリオで隠れ層をある点以上に増やすと性能が悪化するのはなぜだと思いますか?
# @title Submit your feedback
content_review(f"{feedback_prefix}_Wide_vs_Deep_Discussion")セクション1.1: 幅広いモデルが失敗する場合
前に生成した2つの特徴量を持つスパイラルデータセットを使いましょう。さらに多項式特徴量を追加して(これにより最初の層が広くなります)、単一の線形層を訓練します。隠れ層のない同じMLPネットワークを使うこともできます(ただし、もはやMLPとは呼べませんが)。
多項式の次数を最大まで追加します。つまり、すべての項についてとなります。ここで、までの多項式特徴量の総数がなぜ以下の式になるかを数学的に証明するのは楽しい演習です:
また、nn.Linear層にはバイアス項があるため、次数0の多項式項(定数項)は不要です。したがって、多項式特徴量は1つ少なくなります。
def run_poly_classification(poly_degree, device='cpu', seed=0):
"""
Helper function to run the above defined polynomial classifier
Args:
poly_degree: int
Degree of the polynomial
device: string
CUDA/GPU if available, CPU otherwise
seed: int
A non-negative integer that defines the random state. Default is 0.
Returns:
num_features: int
Number of features
"""
def make_poly_features(poly_degree, X):
"""
Function to define the number of polynomial features except the bias term
Args:
poly_degree: int
Degree of the polynomial
X: torch.tensor
Input data
Returns:
num_features: int
Number of features
poly_X: torch.tensor
Polynomial term
"""
num_features = (poly_degree + 1)*(poly_degree + 2) // 2 - 1
poly_X = torch.zeros((X.shape[0], num_features))
count = 0
for i in range(poly_degree+1):
for j in range(poly_degree+1):
# No need to add zero degree since model has biases
if j + i > 0:
if j + i <= poly_degree:
# Define the polynomial term
poly_X[:, count] = X[:, 0]**i * X [:, 1]**j
count += 1
return poly_X, num_features
poly_X_test, num_features = make_poly_features(poly_degree, X_test)
poly_X_train, _ = make_poly_features(poly_degree, X_train)
batch_size = 128
g_seed = torch.Generator()
g_seed.manual_seed(seed)
poly_test_data = TensorDataset(poly_X_test, y_test)
poly_test_loader = DataLoader(poly_test_data,
batch_size=batch_size,
shuffle=False,
num_workers=1,
worker_init_fn=seed_worker,
generator=g_seed)
poly_train_data = TensorDataset(poly_X_train, y_train)
poly_train_loader = DataLoader(poly_train_data,
batch_size=batch_size,
shuffle=True,
num_workers=1,
worker_init_fn=seed_worker,
generator=g_seed)
# Define a linear model using MLP class
poly_net = Net('ReLU()', num_features, [], K).to(device)
# Train it!
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(poly_net.parameters(), lr=1e-3)
_, _ = train_test_classification(poly_net, criterion, optimizer,
poly_train_loader, poly_test_loader,
num_epochs=100, device=DEVICE)
# Test it
X_all = sample_grid().to(device)
poly_X_all, _ = make_poly_features(poly_degree, X_all)
y_pred = poly_net(poly_X_all.to(device))
# Plot it
plot_decision_map(X_all.cpu(), y_pred.cpu(), X_test.cpu(), y_test.cpu())
plt.show()
return num_features
set_seed(seed=SEED)
max_poly_degree = 50
num_features = run_poly_classification(max_poly_degree, DEVICE, SEED)
print(f'Number of features: {num_features}')考えてみよう!1.1: 幅広いモデルは一般化できるか?
このモデルは訓練分布外でもうまく機能していると思いますか?なぜそう思いますか?
# @title Submit your feedback
content_review(f"{feedback_prefix}_Does_a_wide_model_generalize_well_Discussion")セクション2: より深いMLP
所要時間の目安: 約55分
# @title Video 2: Case study
from ipywidgets import widgets
from IPython.display import YouTubeVideo
from IPython.display import IFrame
from IPython.display import display
class PlayVideo(IFrame):
def __init__(self, id, source, page=1, width=400, height=300, **kwargs):
self.id = id
if source == 'Bilibili':
src = f'https://player.bilibili.com/player.html?bvid={id}&page={page}'
elif source == 'Osf':
src = f'https://mfr.ca-1.osf.io/render?url=https://osf.io/download/{id}/?direct%26mode=render'
super(PlayVideo, self).__init__(src, width, height, **kwargs)
def display_videos(video_ids, W=400, H=300, fs=1):
tab_contents = []
for i, video_id in enumerate(video_ids):
out = widgets.Output()
with out:
if video_ids[i][0] == 'Youtube':
video = YouTubeVideo(id=video_ids[i][1], width=W,
height=H, fs=fs, rel=0)
print(f'Video available at https://youtube.com/watch?v={video.id}')
else:
video = PlayVideo(id=video_ids[i][1], source=video_ids[i][0], width=W,
height=H, fs=fs, autoplay=False)
if video_ids[i][0] == 'Bilibili':
print(f'Video available at https://www.bilibili.com/video/{video.id}')
elif video_ids[i][0] == 'Osf':
print(f'Video available at https://osf.io/{video.id}')
display(video)
tab_contents.append(out)
return tab_contents
video_ids = [('Youtube', '3g_OJ6dYE8E'), ('Bilibili', 'BV1FL411n7SH')]
tab_contents = display_videos(video_ids, W=854, H=480)
tabs = widgets.Tab()
tabs.children = tab_contents
for i in range(len(tab_contents)):
tabs.set_title(i, video_ids[i][0])
display(tabs)# @title Submit your feedback
content_review(f"{feedback_prefix}_Case_study_Video")コーディング演習2: 実世界データセットのデータローダー
データ前処理と拡張を含む最初の実世界データセットローダーを作りましょう!Torchvisionの変換機能を使います。
簡単なデータ拡張として以下のステップを行います:
- 10度のランダム回転(
.RandomRotation) - ランダムな水平反転(
.RandomHorizontalFlip)
また、前処理としては: - Pytorchのテンソルをの範囲に変換(
.ToTensor) - 入力をの範囲に正規化(
.Normalize)
ヒント: 変換についての詳細は公式ドキュメントを参照してください。
def get_data_loaders(batch_size, seed):
"""
Helper function to get data loaders
Args:
batch_size: int
Batch size
seed: int
A non-negative integer that defines the random state.
Returns:
img_train_loader: torch.utils.data type
Combines the train dataset and sampler, and provides an iterable over the given dataset.
img_test_loader: torch.utils.data type
Combines the test dataset and sampler, and provides an iterable over the given dataset.
"""
####################################################################
# Fill in all missing code below (...),
# then remove or comment the line below to test your function
raise NotImplementedError("Define the get data loaders function")
###################################################################
# Define the transform done only during training
augmentation_transforms = ...
# Define the transform done in training and testing (after augmentation)
mean = (0.5, 0.5, 0.5) # defined sequence of means per channel
std = (0.5, 0.5, 0.5) # defined sequence of std deviations per channel
# Note that the transform should normalize each channel: output[channel] = (input[channel] - mean[channel]) / std[channel]
preprocessing_transforms = ...
# Compose them together
train_transform = transforms.Compose(augmentation_transforms + preprocessing_transforms)
test_transform = transforms.Compose(preprocessing_transforms)
# Using pathlib to be compatible with all OS's
data_path = pathlib.Path('.')/'afhq'
# Define the dataset objects (they can load one by one)
img_train_dataset = ImageFolder(data_path/'train', transform=train_transform)
img_test_dataset = ImageFolder(data_path/'val', transform=test_transform)
g_seed = torch.Generator()
g_seed.manual_seed(seed)
# Define the dataloader objects (they can load batch by batch)
img_train_loader = DataLoader(img_train_dataset,
batch_size=batch_size,
shuffle=True,
worker_init_fn=seed_worker,
generator=g_seed)
# num_workers can be set to higher if running on Colab Pro TPUs to speed up,
# with more than one worker, it will do multithreading to queue batches
img_test_loader = DataLoader(img_test_dataset,
batch_size=batch_size,
shuffle=False,
num_workers=1,
worker_init_fn=seed_worker,
generator=g_seed)
return img_train_loader, img_test_loader
batch_size = 64
set_seed(seed=SEED)
## Uncomment below to test your function
# img_train_loader, img_test_loader = get_data_loaders(batch_size, SEED)
## get some random training images
# dataiter = iter(img_train_loader)
# images, labels = next(dataiter)
## show images
# imshow(make_grid(images, nrow=8))出力例:

# Train it
set_seed(seed=SEED)
net = Net('ReLU()', 3*32*32, [64, 64, 64], 3).to(DEVICE)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=3e-4)
_, _ = train_test_classification(net, criterion, optimizer,
img_train_loader, img_test_loader,
num_epochs=30, device=DEVICE)# Visualize the feature map
fc1_weights = net.mlp[0].weight.view(64, 3, 32, 32).detach().cpu()
fc1_weights /= torch.max(torch.abs(fc1_weights))
imshow(make_grid(fc1_weights, nrow=8))# @title Submit your feedback
content_review(f"{feedback_prefix}_Dataloader_real_world_Exercise")考えてみよう!2: なぜ最初の層の特徴は高レベルなのか?
3層の深さがあるにもかかわらず、最初の層の特徴マップに明確な動物の顔が見えます。このMLPは階層的な特徴表現を持っていると思いますか?なぜそう思いますか?
# @title Submit your feedback
content_review(f"{feedback_prefix}_Why_first_layer_features_are_high_level_Discussion")セクション3: 倫理的側面
所要時間の目安: 約20分
# @title Video 3: Ethics: Hype in AI
from ipywidgets import widgets
from IPython.display import YouTubeVideo
from IPython.display import IFrame
from IPython.display import display
class PlayVideo(IFrame):
def __init__(self, id, source, page=1, width=400, height=300, **kwargs):
self.id = id
if source == 'Bilibili':
src = f'https://player.bilibili.com/player.html?bvid={id}&page={page}'
elif source == 'Osf':
src = f'https://mfr.ca-1.osf.io/render?url=https://osf.io/download/{id}/?direct%26mode=render'
super(PlayVideo, self).__init__(src, width, height, **kwargs)
def display_videos(video_ids, W=400, H=300, fs=1):
tab_contents = []
for i, video_id in enumerate(video_ids):
out = widgets.Output()
with out:
if video_ids[i][0] == 'Youtube':
video = YouTubeVideo(id=video_ids[i][1], width=W,
height=H, fs=fs, rel=0)
print(f'Video available at https://youtube.com/watch?v={video.id}')
else:
video = PlayVideo(id=video_ids[i][1], source=video_ids[i][0], width=W,
height=H, fs=fs, autoplay=False)
if video_ids[i][0] == 'Bilibili':
print(f'Video available at https://www.bilibili.com/video/{video.id}')
elif video_ids[i][0] == 'Osf':
print(f'Video available at https://osf.io/{video.id}')
display(video)
tab_contents.append(out)
return tab_contents
video_ids = [('Youtube', 'ou35QzsKsdc'), ('Bilibili', 'BV1CP4y1s712')]
tab_contents = display_videos(video_ids, W=854, H=480)
tabs = widgets.Tab()
tabs.children = tab_contents
for i in range(len(tab_contents)):
tabs.set_title(i, video_ids[i][0])
display(tabs)# @title Submit your feedback
content_review(f"{feedback_prefix}_Ethics_Hype_in_AI_Video")まとめ
この日の2つ目のチュートリアルでは、MLPをさらに深く掘り下げ、その数学的および実践的な側面を詳しく見てきました。具体的には、深いネットワーク、幅広いネットワーク、そしてそれらが使用する転送関数に依存することについて学びました。また、初期化の重要性についても学び、スマートな初期化のための2つの方法を数学的に解析しました。
# @title Video 4: Outro
from ipywidgets import widgets
from IPython.display import YouTubeVideo
from IPython.display import IFrame
from IPython.display import display
class PlayVideo(IFrame):
def __init__(self, id, source, page=1, width=400, height=300, **kwargs):
self.id = id
if source == 'Bilibili':
src = f'https://player.bilibili.com/player.html?bvid={id}&page={page}'
elif source == 'Osf':
src = f'https://mfr.ca-1.osf.io/render?url=https://osf.io/download/{id}/?direct%26mode=render'
super(PlayVideo, self).__init__(src, width, height, **kwargs)
def display_videos(video_ids, W=400, H=300, fs=1):
tab_contents = []
for i, video_id in enumerate(video_ids):
out = widgets.Output()
with out:
if video_ids[i][0] == 'Youtube':
video = YouTubeVideo(id=video_ids[i][1], width=W,
height=H, fs=fs, rel=0)
print(f'Video available at https://youtube.com/watch?v={video.id}')
else:
video = PlayVideo(id=video_ids[i][1], source=video_ids[i][0], width=W,
height=H, fs=fs, autoplay=False)
if video_ids[i][0] == 'Bilibili':
print(f'Video available at https://www.bilibili.com/video/{video.id}')
elif video_ids[i][0] == 'Osf':
print(f'Video available at https://osf.io/{video.id}')
display(video)
tab_contents.append(out)
return tab_contents
video_ids = [('Youtube', '2sEPw4sSfSw'), ('Bilibili', 'BV1Kb4y1r76G')]
tab_contents = display_videos(video_ids, W=854, H=480)
tabs = widgets.Tab()
tabs.children = tab_contents
for i in range(len(tab_contents)):
tabs.set_title(i, video_ids[i][0])
display(tabs)# @title Submit your feedback
content_review(f"{feedback_prefix}_Outro_Video")ボーナス: 良い初期化の必要性
このセクションでは、深いネットワークの初期化の原理を導出します。重みが大きすぎると、信号の順伝播が混沌となり、誤差勾配の逆伝播が爆発します。一方、重みが小さすぎると、信号の順伝播は秩序的になり、誤差勾配の逆伝播は消失します。初期化の鍵は、秩序と混沌の境界に重みを設定することです。このセクションではその境界を導出し、正しい初期分散の計算方法を示します。
多くの既存の深層学習フレームワークの典型的な初期化スキームは、この秩序と混沌の境界での初期化の原理を暗黙的に利用しています。したがって、このセクションは初回では安全にスキップでき、ボーナスセクションです。
# @title Video 5: Need for Good Initialization
from ipywidgets import widgets
from IPython.display import YouTubeVideo
from IPython.display import IFrame
from IPython.display import display
class PlayVideo(IFrame):
def __init__(self, id, source, page=1, width=400, height=300, **kwargs):
self.id = id
if source == 'Bilibili':
src = f'https://player.bilibili.com/player.html?bvid={id}&page={page}'
elif source == 'Osf':
src = f'https://mfr.ca-1.osf.io/render?url=https://osf.io/download/{id}/?direct%26mode=render'
super(PlayVideo, self).__init__(src, width, height, **kwargs)
def display_videos(video_ids, W=400, H=300, fs=1):
tab_contents = []
for i, video_id in enumerate(video_ids):
out = widgets.Output()
with out:
if video_ids[i][0] == 'Youtube':
video = YouTubeVideo(id=video_ids[i][1], width=W,
height=H, fs=fs, rel=0)
print(f'Video available at https://youtube.com/watch?v={video.id}')
else:
video = PlayVideo(id=video_ids[i][1], source=video_ids[i][0], width=W,
height=H, fs=fs, autoplay=False)
if video_ids[i][0] == 'Bilibili':
print(f'Video available at https://www.bilibili.com/video/{video.id}')
elif video_ids[i][0] == 'Osf':
print(f'Video available at https://osf.io/{video.id}')
display(video)
tab_contents.append(out)
return tab_contents
video_ids = [('Youtube', 'W0V2kwHSuUI'), ('Bilibili', 'BV1Qq4y1H7Px')]
tab_contents = display_videos(video_ids, W=854, H=480)
tabs = widgets.Tab()
tabs.children = tab_contents
for i in range(len(tab_contents)):
tabs.set_title(i, video_ids[i][0])
display(tabs)# @title Submit your feedback
content_review(f"{feedback_prefix}_Need_for_Good_Initialization_Bonus_Video")Xavier初期化
非線形性のない全結合層の出力(例えば隠れ変数)のスケール分布を見てみましょう。この層には個の入力()とそれに対応する重みがあります。出力は次のように表されます。
重みはすべて同じ分布から独立にサンプリングされているとします。この分布は平均0、分散を持つと仮定します。これは分布がガウスである必要はなく、平均と分散が存在すればよいです。入力も平均0、分散を持ち、および互いに独立であると仮定します。この場合、の平均と分散は次のように計算できます:
\begin{align}
E[o_i] &= [ x_j] \ \
&= [ E[x_j] = 0, \ \ \
[o_i] &= - ( \ \
&= [ - 0 \ \
&= [ \ \
&= n_$\mathrm{in} \sigma^2 \gamma^2
\end{align}
$
分散を一定に保つ一つの方法はと設定することです。次に逆伝播を考えます。ここでも同様の問題があり、出力に近い層から勾配が伝播します。順伝播と同様の理由で、勾配の分散が爆発しないためにはを満たす必要があります。ここではこの層の出力数です。両方を同時に満たすことはできないため、代わりに次の条件を満たすようにします:
\begin{align}
$\frac{1}{2} (n_\mathrm{in} + n_\mathrm{out}) \sigma^2 = 1 \text{ または同値に }
\sigma = \sqrt{\frac{2}{n_\mathrm{in} + n_\mathrm{out}}}
\end{align}
$
これが現在標準的かつ実用的に有益なXavier初期化の理論的根拠であり、作成者の一人の名前にちなんでいますGlorot and Bengio, 2010。通常、Xavier初期化は平均0、分散のガウス分布から重みをサンプリングします。
また、Xavierの直感を用いて一様分布から重みをサンプリングする場合の分散も選べます。一様分布の分散はです。これを条件に代入すると、次のように初期化することが推奨されます。
この説明は主にこちら$から引用しています。
初期化とその違いについてもっと知りたい場合はこちらを参照してください。
転送関数を考慮した初期化
LeakyReLUの最適なゲインを同様の手順で導出しましょう。
LeakyReLUは数学的に次のように表されます:
ここでは負の傾きの角度を制御します。
この活性化関数を持つ単一層を考えると、
\begin{align}
&= \
&= f\left( o_{i} \right)
\end{align}
ここではノードの活性化を表します。
出力の期待値は依然として0、すなわちですが、分散は変わり、と仮定すると、
\begin{align}
[ &= [ - \left( \mathbb{E}[ \right)^{2} \ \
&= \frac{\mathrm{Var}[o_i] + [o_i]}{2} \ \
&= \frac{1+\alpha^2}{2}n_\mathrm{in} \sigma^2 \gamma^2
\end{align}
ここでは入力の分散、は重みの分散です。
したがって、前述の導出に従うと、
導出されたの式からわかるように、選択する転送関数は重みの分布の分散に関連しています。LeakyReLUの負の傾きが大きくなるとは小さくなり、重みの分布は狭くなります。一方、が小さくなると重みの分布は広くなります。例えば、重みは平均0、分散の正規分布からサンプリングして初期化します。
Leaky ReLUを用いたXavier初期化の最適ゲイン
時間があまりないと思うので、ここで何が起きているか説明します。理論的な初期化ゲインを導出しましたが、実際にそれが成り立つかどうかは疑問です。ここでは様々なゲインを試し、経験的な最適値が理論値と一致するかを確認します!
時間があれば、mode引数を変えて初期重みのサンプリング分布を一様分布に変更することもできます。
N = 10 # Number of trials
gains = np.linspace(1/N, 3.0, N)
test_accs = []
train_accs = []
mode = 'uniform'
for gain in gains:
print(f'\ngain: {gain:.2f}')
def init_weights(m, mode='normal'):
if type(m) == nn.Linear:
if mode == 'normal':
torch.nn.init.xavier_normal_(m.weight, gain)
elif mode == 'uniform':
torch.nn.init.xavier_uniform_(m.weight, gain)
else:
print("No specific mode selected. Please choose `normal` or `uniform`")
negative_slope = 0.1
actv = f'LeakyReLU({negative_slope})'
set_seed(seed=SEED)
net = Net(actv, 3*32*32, [128, 64, 32], 3).to(DEVICE)
net.apply(init_weights)
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(net.parameters(), lr=1e-2)
train_acc, test_acc = train_test_classification(net, criterion, optimizer,
img_train_loader,
img_test_loader,
num_epochs=1,
verbose=True,
device=DEVICE)
test_accs += [test_acc]
train_accs += [train_acc]結果をプロットしてみましょう!
# Find the gain that leads to the highest accuracy
best_gain = gains[np.argmax(train_accs)]
# Calculate the theoretical gain
theoretical_gain = np.sqrt(2.0 / (1 + negative_slope ** 2))
plt.figure()
plt.plot(gains, test_accs, label='Test accuracy', marker='.', alpha=0.6)
plt.plot(gains, train_accs, label='Train accuracy', marker='.', alpha=0.6)
plt.scatter(best_gain, max(train_accs),
label=f'best gain={best_gain:.2f}',
c='k', marker ='x', linewidths=2)
plt.scatter(theoretical_gain, max(train_accs),
label=f'theoretical gain={theoretical_gain:.2f}',
c='g', marker ='x', linewidths=2)
plt.ylabel('Accuracy (%)')
plt.xlabel('gain')
plt.legend()
plt.show()